
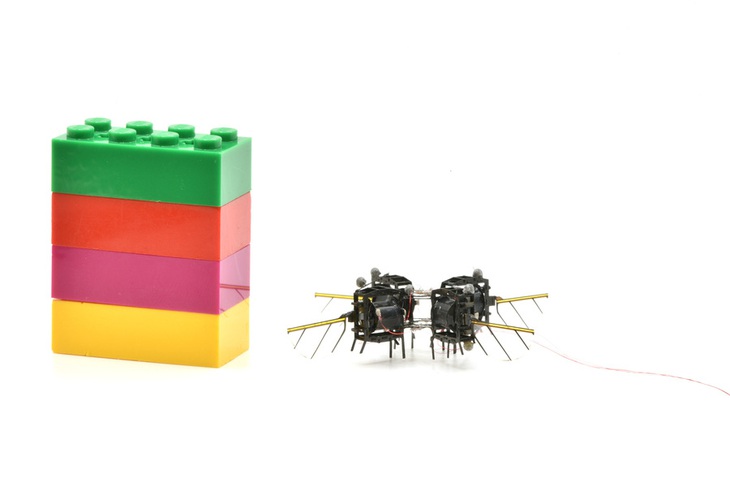
Thiết kế mới có đủ không gian để robot côn trùng mang thêm pin hay cảm biến - Ảnh: MIT News
Các nhà khoa học của Viện Công nghệ Massachuset (MIT), Mỹ đang thiết kế loại robot côn trùng nhằm giúp thụ phấn nhanh chóng, đảm bảo trái cây và rau củ phát triển ở tốc độ chưa từng có.
Ý tưởng dùng robot côn trùng thụ phấn không mới. Tuy nhiên, các thế hệ robot côn trùng trước đây thường gặp phải các vấn đề như thiếu sức bền, tốc độ và sự linh hoạt trên không so với ong và các loài côn trùng giúp thụ phấn khác.
Trong nghiên cứu mới đây, nhóm MIT tiết lộ họ có thể tạo ra một thiết kế có các tính năng giải quyết được các hạn chế hiện nay trong quá trình thụ phấn cơ học.
Theo trang LiveScience, thiết kế mới có thể bay lâu hơn 100 lần nhưng vẫn nhẹ hơn so với các phiên bản robot côn trùng trước đó. Đồng thời phiên bản mới cũng cải thiện được độ chính xác và sự nhanh nhẹn. Công nghệ mới này có thể giúp tăng đáng kể năng suất cây trồng mà không gây hại cho môi trường.
"Với việc cải thiện tuổi thọ và độ chính xác của loại robot này, chúng tôi đang tiến gần hơn đến một số ứng dụng rất thú vị, chẳng hạn hỗ trợ thụ phấn", phó giáo sư Kevin Chen, đồng tác giả chính của nghiên cứu tại MIT, cho biết.
Các thiết kế robot côn trùng trước được tạo thành từ 4 đơn vị (unit), mỗi đơn vị chứa 2 cánh, khiến chúng đẩy ra quá nhiều khí và làm giảm lực nâng của robot.
Trong thiết kế mới, mỗi một trong 4 đơn vị chứa một cánh vỗ hướng ra xa tâm robot. Điều này giúp ổn định chuyển động thẳng đứng của robot, cho phép nó bay cao hơn trước, giúp nó nhẹ hơn và có thể mang thêm pin để bay lâu hơn.
Nhóm nghiên cứu cho biết vẫn cần phải cải thiện thiết kế hơn nữa. Cánh của loài ong được điều khiển tinh vi bởi một hệ cơ bắp phức tạp. Nhóm muốn tinh chỉnh thiết kế cánh của robot để có thể càng tiệm cận với cánh thật của côn trùng càng tốt trong vòng 5 năm tới.
Nghiên cứu được đăng trên tạp chí Science Robotics.












Tối đa: 1500 ký tự
Hiện chưa có bình luận nào, hãy là người đầu tiên bình luận